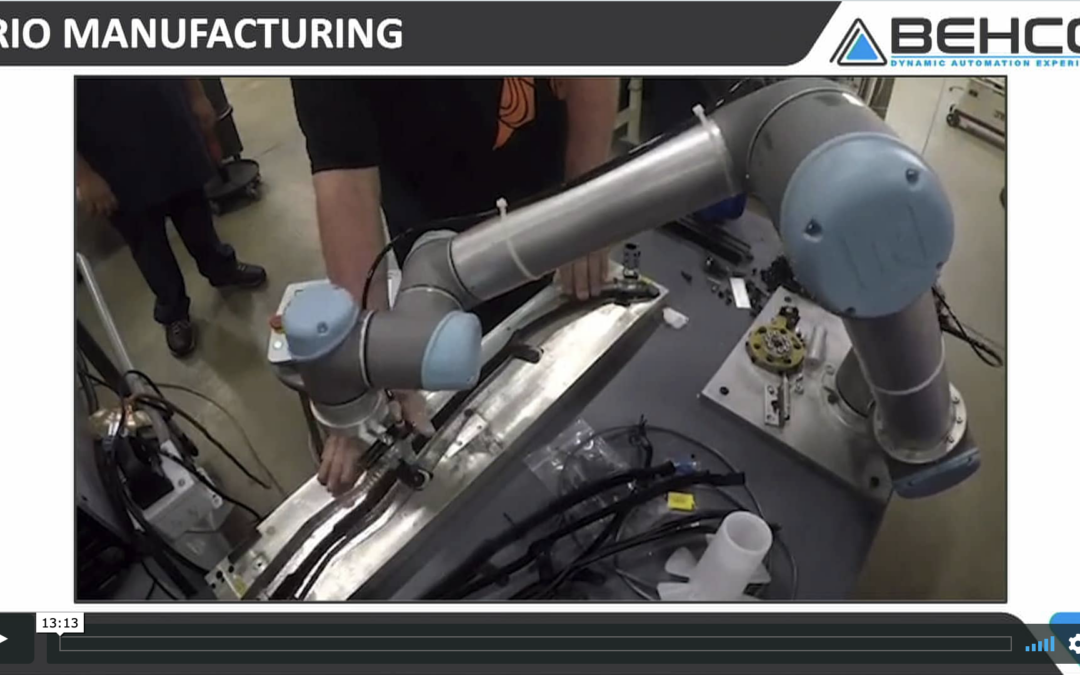
Agency and automation is explored through three case studies of the use of Cobots – collaborative robots – in three different auto production firms. The business challenges faced by these firms include labor shortages, quality control and reduction of waste. The Cobot solution resulted in...