
Agency and automation is explored through three case studies of the use of Cobots – collaborative robots – in three different auto production firms. The business challenges faced by these firms include labor shortages, quality control and reduction of waste. The Cobot solution resulted in different effects on agency through (1) agency task displacement, (2) agency enhancement and (3) agency expansion. In addition, the individual characteristics of the workplace structure also mediated the effects of Cobots on agency. In the first case (Uno Motors) Fordist technology and the presence of a union ensured that Cobots were deployed instrumentally. The second case (Duo Global Technologies) was one in which Cobots were flexibly deployed to meet changing production demands. The third case (Trio) went furthest in integrating Cobots into the production process as co-workers requiring new workplace relationships together with the potential to recognize new forms of agency.
INTRODUCTION
According to recent Pew survey data, the reaction of Americans to the increasing use of automation is decidedly mixed. While nearly 50 percent feel that the recent use of automation has done more to hurt U.S. workers almost 30 percent believe it has had no effect while only 20 percent think it has helped the average worker. On the other hand a future world of expanded job automation is viewed more pessimistically. Over three-quarters fear that automation will worsen income inequality while only one-third feel that it automation will expand the number of good, high-paying jobs (Chart 2). Finally, eighty-two percent of survey respondents believe that computers and robots will take over the majority of jobs over the next 30 years. However there is a strong NIMO – Not in My Occupation – effect as well since sixty-two percent of respondents felt that their jobs were safe from automation (Chart 3).1
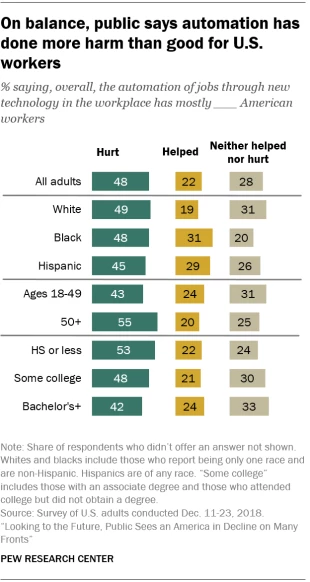
Chart 1
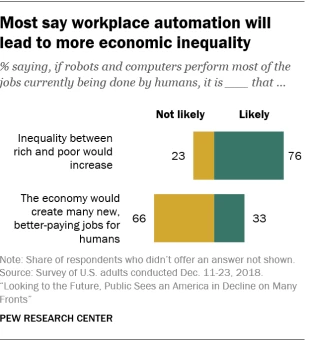
Chart 2
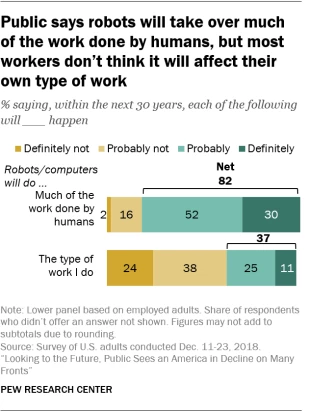
Chart 3
Trepidation over the harmful effects of new technology on jobs and the quality of work life is not new. But the pace and manner of technological innovation suggests that people’s beliefs about the threat of automation is not misplaced. Economists have estimated that about half of all current occupations have a high risk of computer automation (Frey and Osborne 2017). In the case of robots one study estimated that each additional robot introduced into the economy between three and six workers will lose their jobs and for those workers remaining employed wages will fall between one-quarter and one-half percent overall (Acemoglu and Restrepo 2017). On the other hand this assumes a static occupational landscape. New jobs and new tasks will be created through the use of computer automation and robotics.
This study presents three distinct cases examining the introduction of robots into auto assembly and parts production plants. It also highlights distinct challenges of and opportunities for using robots in each of the companies studied. Finally, the type of robot, known as collaborative robots or co-bots, introduced by each firm illustrates the way in which robot-human interaction is helping to re-shape the role of human agency in production.
An industrial robot is defined by the International Federation of Robotics as “an automatically controlled, reprogrammable and multipurpose manipulator for use in industrial automation applications (Bahradwaj and Dvorkn 2019). The term collaborative robot is intended to distinguish these automated machines from the large, powerful, dangerous and expensive robots that work in caged environments to closely restrict human-machine interaction. Cobots still require safety protocols that function through programmed limits on force and movement when humans enter their field of operation.
In the U.S. and across Europe and the UK industrial robots are found in the greatest numbers in the auto industry. While France has the greatest density of robots per worker the U.S. ranks second (Chart 4).
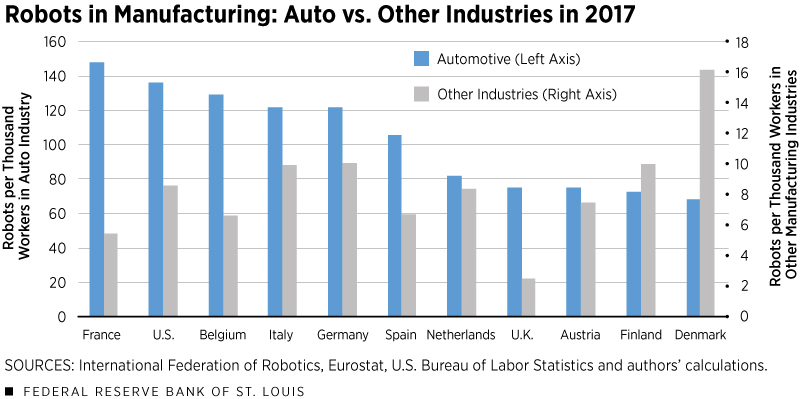
Chart 4
Given the prevalence of industrial robots in the auto industry it makes sense to investigate the use of robots on the ground. Our team conducted interviews with owners, managers, engineers and production workers at three automotive and auto parts producers in Southeast Michigan – the Greater Detroit region. In addition, one team member is professionally embedded in the supply chain through his work as sales and technology representative for BEHCO, a high-tech distributor selling Universal Robots – the leader in industrial Cobots globally. Furthermore, since the auto industry was one of the early adopters in the use and adaptation of robot technologies it makes sense to explore the ways in which robots are currently deployed in large, medium and small firms in the auto sector.
The business case scenarios depicted in these case studies begin to answer the following provocative questions, centered largely around the challenges of wastage created by a shortage of skilled production workers: What if a manufacturer could make their biggest warranty or quality issue go to zero defects? What if a company could get payback in a few months thereby allowing them to re-shore production from China? What if a firm deploys robots that are such integral part of the workplace culture that they the robots are given names and become team members?
Cobots, these new robots that are built to be safe working with people and easy to teach without writing programming code, are working in production every hour of every day across manufacturing. One of the co-authors of this paper has worked with Universal Robots – an industry leader in Cobot manufacturing – since 2013. The authors want to share stories about the business cases and impact the Cobots are making in production. The case studies are intended to help you understand the decision drivers, expected and unexpected benefits and risks that are managed in order to enable collaborative robotics applications.
Small, Medium and Large manufacturing companies are struggling with labor shortages with increasing pressure and problems associated with absenteeism and worker quality. Ultimately this is creating significant waste throughout processes and value chain. A recent report from Workforce Intelligence Network (WIN) in coordination with Michigan WORKS and Oakland County government starts to quantify the costs associated with employee turnover. The subjective data was collected from member manufacturing companies, large and small. The data indicates the average time per employee working for a company as a Production Worker is 3 years and a General Labor is less than 2 years. On average, the cost per employee to hire, train and overcome inefficiency is $6,000. Manufacturers are spending hundreds of thousands of dollars per year responding to the labor shortage. This hard to measure overhead, along with assignable benefits from automation are driving the demand for Cobots and automation in manufacturing.
Traditional robotics continues to offer solutions to the larger makers due to scale, cost and complexity being less of a risk. However these same risks are unmanageable by Small and Medium size companies, leaving them exposed to raising labor rates with limited supply and no real solution – until the rise of the Cobots. Large companies have found benefits, which we’ll share, but the real impact has been with SME’s that can now afford, control and leverage flexibility in their processes. The authors studied these company’s decision drivers and talked to floor workers, engineers and senior management to learn why these are welcomed, how to socialize the Cobots and what the returns have been in Small, Medium and Large companies.
THE CASE STUDIES
This case study involves three companies:
Company 1 [Uno Motors]: Large multinational producer of cars and trucks in the U.S. and abroad. Theme: Agency (Task) Displacement
Company 2 [Duo Global Technologies]: A small firm (less than 100 employees) supplying precision machined powertrain components. Theme: Agency Enhancement
Company 3 [Trio]: A mid-sized company (200-500 employees) producing vehicle badges, arguably the most important symbol evoking corporate image, brand marketing and cultural and aesthetic value. Theme: Agency Expansion
Case Study #1: Uno Motors
In 2014 one of the co-authors met with Dave and Frank, technical specialists for robotics and machine vision, and demonstrated the Universal Robot UR5 at their facility with 10-12 participants from engineering and management. It took only minutes to set up and power the Cobot, using the 110V wall outlet. The participants had never seen a Cobot demo before. Since this was a force-limited Cobot the demo did not require safety guarding. All the engineers moved away from the table, when the Cobot encountered an obstruction in its path – in this case a human being – the Cobot immediately stopped…all that was said was “wow”. That became a metric – “wows per meeting” – for judging the effectiveness of future demos.
The problem facing this company, and many large companies like them, was – how do I use this new tool without upsetting the company’s culture? Getting robots on the floor with union-represented workforce was tried by another large customer and failed due to a lack of trust on future use. Although this company has labor shortage issues, the potential gains were likely going to be constrained by labor-management friction. Ultimately, the production management has to own the tools and results – these Cobots are not guarded and were easily damaged. Given the history and risks, the company tried a few different uses while building a strategy to attack their largest problems in production – quality and warranty.
Starting with engine oil leak inspection, the Cobot was able to prove its value by performing inspection that wasn’t feasible with people – finding miniscule droplets in a number of locations that change depending on the build variation. They went further to inspect the seating for electrical connections; again very difficult for people to inspect given the amount of connections and speed of the line. Using Augmented Reality (AR) to beam light on the failed connection, it can be quickly identified and repaired. They have a machine learning solution that enables the operators to be successful, saving tremendous effort in the repair stations where fixing the problem after body installation is very difficult due to access.
The results for the company have been summarized by Dave: “you have no idea how big of a deal this is for our company, we measured the before and after impact with our Mexico engine plant and our #1 warranty issue for failed body connections has gone to zero defects now for 3 months straight”. They now have these inspection cells installed at 6 plants globally for Powertrain with more plants in the queue. Most recently, an inspection cell was deployed at their flagship truck plant in Michigan – the first for vehicle operations. Two Cobots with vision systems run 6 different patterns for 650,000 different vehicle-build variations – measuring 65 quality inspection points in 25 seconds. When watching the line run with Frank during trials, the Cobot ran into a mis-assembled hose and immediately stopped with the force limited function. Frank said “This is really awesome, neither the vehicle nor the Cobot were damaged by the impact, I don’t think we could use them if they did”.
The waste removed from these improvements will be targeted globally throughout their value chain for years to come. The team won a prestigious manufacturing award and continues to investigate waste reduction as a driving force for applications.
So robots with vision systems were effectively used to inspect for oil leaks. This resulted in fewer warranty claims and greater cost saving. These robots replaced inspection work in which human visual pattern recognition is mistake-prone due to fatigue and boredom. The cost of error can be $7,000 per unit which is often all of the profit made from the vehicle. The workers perform general labor which means that it is low-value added work but high cost repair and remediation in a typical highly integrated assembly process. In today’s labor market about 10-15% of these positions remain unfilled, mostly in the 2nd and 3rd shifts. The robot, by contrast, can work 24/7. On the other hand skilled laborers have a set of new responsibilities: robot maintenance and control.
Agency and Automation in Case Study #1: Historical Antecedents and Lessons Learned: Automation and Agency (Task) Displacement
Of the three case studies the Uno Motors case is the only one to involve organized labor. It also represents an example of automation that displaces agency in the sense that tasks formerly requiring human vision are now being undertaken by Cobots. Automation that displaces human agency is often seen as a threat by those workers whose tasks are eliminated. This is the basis for much production worker distrust of automation. It also conjures up the image of machine-breakers, Luddites. The term Luddite or Luddism is often associated with early 19th century workers who willfully and often violently destroyed machinery in the hopes of slowing down or forestalling technical change. One version of events suggests that the followers of mythical Captain Ludd were emulating the weaver Ned Ludd who took a hammer to 2 knitting machines in retaliation for being unfairly punished – he was whipped. Soon thereafter workers were blaming Ned Ludd for outbreaks of machine sabotage. “Destruction of a new type of machinery, which endangered jobs and reduced the standard of life of sections of the working class, is the best-known form of Luddism using this word now in a broader sense to describe all machine breaking…The long period of the Industrial Revolution when new inventions were applied piecemeal first to this industry, then to that, causing unemployment, dislocation and confusion in the older forms of industry caused a great deal of discussion. There was a ‘battle of ideas’ going on…” (Munby 1971, 33).
Opposition to machine production took different forms in different countries. In the late 18th century a precursor of supply-side economic policy involved wealthy feudal families and aristocrats receiving special exemptions from taxes, regulations and traditional craft worker protections in order to promote the creation of industrial enterprise zones in the French textile-producing region of Normandy. The goal was to encourage the production of high quality fabrics which could then be exported at lower costs. This allowed for the introduction of spinning machines which could produce low-cost, high-quality textiles without the need to hire craft workers. The Norman workers, the majority of whom were women, saw their wages fall due to the lower cost of using machines. One spinning machine or frame could do the work of 100 workers (Horn 2012, 177). As one writer at the time exclaimed, “These fine machines will enrich a few individuals, but will ruin a whole country” (Manuel 1938, 181).
In 1789, workers, faced with unemployment, reacted by taking to the streets, marching on manufacturers with the intent of destroying their spinning machines. Pitched battles were waged, machines were burned and employers and police retaliated by killing many of the protesters (Horn 2012, 179-183). But upon further examination this was not a single-minded reaction against machinery. These workers opposed the new machinery because it denied the possibility for alternative technologies – alternative machines – that could be used to complement the skills of the workers and create an economy based on fair prices not the lowest possible price along with employment for all who wanted work and decent wages. Instead of export-led growth, workers argued and fought for system of production that first and foremost met local needs thereby preserving employment by adopting machine technology that worked with laborers (Horn 2012).
Approximately 30 years later British workers rose up against the real threat of starvation resulting from both the elimination of state protections like the minimum wage and the introduction of labor-replacing machinery. These workers, Luddites, engaged in numerous acts of destruction of machines and raw materials partly as a way to disrupt the industry in order to obtain better wages – what one historian called “collective bargaining by riot” (Hobsbawm 1964, 7). Rather than portraying these industrial actions as parochial, ill-conceived and ultimately futile measures that merely forestalled the inevitable adoption of machinery we could instead appreciate and take seriously their vision technology involves restructuring workplaces and resetting the roles and relationships between employers and workers, workers and technology and employers and technology. In these historical examples workers wanted to preserve a set of traditions and values that represented a fairer, more humane, moral economy (Thompson 1966 1971). So, new technology itself was not the enemy. Rather the question was how machines could be embedded in a social system of production in such a way that human agency would be engaged and valued. Likewise these case studies highlight the many different organizational and cultural responses to the introduction of in this case robot technology with respect to agency.
Another dimension of the agency-automation dyad is illustrated by the prospect of a workerless automobile factory. This vision of a fully automated assembly plant extends back to the 1950s when automated machines were being introduced into factories in the Midwest. The Cleveland-area Brookpark engine plant was targeted for large-scale automation. The autoworkers’ union, the UAW, saw this as a direct threat to their membership. Those workers who were employed in the automated factory had to shift their work away from the skilled tasks involving machine set-up and operation – tasks that allowed them control over the pace and intensity of work – to little more than assistants controlled by the dictates of the machine. This specter of technology-driven work and technological unemployment occupied union members attending the annual meeting of the UAW in 1954. It was argued that the automated manufacturing plant was threatening to “create a social and economic nightmare in which men walk idle and hungry, made obsolete as producers because the mechanical monsters around them cannot replace them as consumers” (Meyer 2002, 73). Here we have a 20th century fear of technology as displacing human agency altogether on the shop floor.
Today, faced with the growing number of tasks being outsourced to non-human devices, the threat of automation as an agency displacing phenomenon is once again upon us. Yet, the corporation is working with the union to mitigate the worker displacement effects of task displacement. The Cobots used in this case study replace human vision with computer-aided vision and augmented reality (AR). This enhanced visioning capacity improves inspection quality. While the task is displaced from human to machine the task performance itself is improved. Employment losses due the widespread introduction of automation, like Cobots, is inevitable according to Brad Markell executive director of the Industrial Union Council for AFL-CIO in Washington, DC . What matters is that employees retain a voice in how the technology is used and are given training and access to the higher-quality jobs that might be created by the robots’ introduction (Elejalde-Ruiz 2018).To the extent that new tasks are created in the process worker displacement can be avoided. So, in May of 2019 Uno Motors announced the creation of a technical training center. This center will train workers in collaborative robot technology and advanced vision systems. This case study both clarifies and complicates our understanding of agency and automation.
Case Study #2: Duo Global Technologies
Duo Global Technologies was shopping for their first Cobot in 2014. When looking at the challenge of needing to be competitive in the global market, Duo, like many small manufacturing companies, struggled to find benefits from traditional robots. Traditional industrial solutions are delivered ‘turn-key’ by Integrators that end up having control over the process as they write the code to integrate the tools and process with the parts being manipulated. With fixed infrastructure that is difficult to change this is an expensive option and, as a result, most small companies are not interested in that approach. Duo was looking for a flexible tool that could be easily programmed and safe to work with on the floor.
The lead manufacturing engineer, Ryan, had no prior robotics experience but was well versed in machine controls. With training and support they were able to deploy 12 Cobots over 4 years and have a positive impact on their business. The ROI for their first Cobot was made in 4 months. Duo has made great strides largely because they have complete control over the tools. Frequent change-over is not an issue because they simply unplug, move and reprogram their Cobots for a new job. Output on the large multi-shift projects went from roughly 1600 parts/day to 3400 parts/day by increasing cycle time (handling hot parts is no problem for the Cobot) and running a 3rd shift with ‘lights-out’. Over the past few years they’ve been able to re-shore production to Michigan since they are now more competitive than exporting from China.
Ryan, the lead engineer, explained “The cost savings was much more than the direct labor, by using an automated system with imbedded QC inspection – our Indirect Labor is greatly reduced since the data is machine driven and our technicians work on analysis and problem resolution”. When reflecting on the strategy that’s lead them from no robotics to a semi-automated production floor, Ryan also noted: “We would be out of business right now if we didn’t take these actions – the trade war would have sunk our boat if we didn’t balance our production for local supply”. It was also key to note that Ryan has since trained the production team and maintenance team on the programming and functions – they are now in charge of the process and future installations and Ryan was promoted to VP of Sales and Engineering.
Agency and Automation Case Study #2 – Historical Antecedents and Job Enrichment and Agency Enhancement
The mid-20th century adoption of automation mirrored the rise of Fordist mass production. Fordism emerged as an economic system out of the need to produce vehicles in large quantities using standardized parts thereby lowering unit costs and increasing consumer market demand. Machines were dedicated to a single purpose – e.g. stamping metal – and workers were similarly deployed throughout the factory at fixed intervals along the assembly line to assemble various parts of the car. If a machine could be introduced to perform the same task that individual worker performed and the cost of the machine, amortized over the length of the production run or level of output, was lower than the cost of hiring, training, supervising and employing workers the machine would be adopted. Fordism constituted a straight-forward example of agency displacement: using automated machine processes to substitute for human labor. In those tasks in which safety and health of the workers was a serious and ongoing concern – e.g. welding at angles that put strain on the worker’s body or painting that required respiratory equipment – the union welcomed the introduction of technology as long the machines were dedicated to performing a single unsafe, unhealthy task. This recent account of the early days of the introduction of robot co-workers in an auto plant illustrates the role of task displacement without worker displacement as was illustrated in the first case study:
The inventions introduced by Northwestern and UC, Berkeley had first put GM’s employees on edge. Workers were concerned that their jobs might get replaced by the robots Colgate, Pehskin, Akella and their colleagues were developing. However, as experimentation continued the early cobots began to change their perception for the better.
“The assembly line workers really appreciated that it was not a robot looking to replace them,” Peshkin said. “Because it was collaborative and because their human skills were going to continue to be needed to work with this cobot, it helped them do their jobs with less risk of ergonomic injury. They were smooth, quick, responsive and agile, so they were appreciated.” Some of the prototype cobots quickly became recognized as essential by assembly line workers. (Pittman 2016)
As the global auto industry became more competitive and consumer demand diversified technological demands also shifted away from standardized high volume product runs. Instead more frequent re-tooling for model changes required the use of more flexible labor and machinery. Workers were expected to monitor and control machinery. The movement toward flexible specialization and lean production began to transform the industry in the later quarter of the 20th century. In some cases this had the effect of enhancing human agency by giving workers more voice in the production process – although there was no guarantee that these additional voices were always listened to – and more control over the machines that they worked with.
Likewise, in this second case study, the introduction of collaborative robots has created new work and new occupations for plant personnel. In particular the industrial engineer can take over responsibility for programming. In addition the new occupation of robotics engineer involves a number of unique tasks that emerged out of the introduction and diffusion of robot technology. Among these:
- Review or approve designs, calculations, or cost estimates.
- Debug robotics programs. Build, configure, or test robots or robotic applications.
- Provide technical support for robotic systems.
- Design end-of-arm tooling.
- Supervise technologists, technicians, or other engineers.
- Integrate robotics with peripherals, such as welders, controllers, or other equipment.
- Install, calibrate, operate, or maintain robots.
- Conduct research into the feasibility, design, operation, or performance of robotic mechanisms, components, or systems, such as planetary rovers, multiple mobile robots, reconfigurable robots, or man-machine interactions.
- Document robotic application development, maintenance, or changes.
- Write algorithms or programming code for ad hoc robotic applications.2
Similarly, the new occupation of robotics technician arose to meet the needs of companies that install and maintain robots. Their tasks include are:
- Make repairs to robots or peripheral equipment, such as replacement of defective circuit boards, sensors, controllers, encoders, or servomotors.
- Troubleshoot robotic systems, using knowledge of microprocessors, programmable controllers, electronics, circuit analysis, mechanics, sensor or feedback systems, hydraulics, or pneumatics.
- Install, program, or repair programmable controllers, robot controllers, end-of-arm tools, or conveyors.
- Maintain service records of robotic equipment or automated production systems.
- Perform preventive or corrective maintenance on robotic systems or components.
- Build or assemble robotic devices or systems.
- Assist engineers in the design, configuration, or application of robotic systems.
- Install new robotic systems in stationary positions or on tracks.
- Program complex robotic systems, such as vision systems.
- Develop robotic path motions to maximize efficiency, safety, and quality.
- Fabricate housings, jigs, fittings, or fixtures, using metalworking machines.
- Maintain inventories of robotic production supplies, such as sensors or cables.3
The work environment of the robotics engineers and robotics technicians requires a lot of personal interaction. Eighty percent of robotics engineers and seventy-seven percent of robotics technicians surveyed by the Department of Labor report having face-to-face conversations every day, over ninety percent use e-mail daily while sixty percent (robotics engineers) and fifty percent (robotics technicians) communicate by phone every day. This work environment differs from the traditional Fordist assembly line in which task specialization demanded little or no communication between workers and in some cases penalized workers for interacting with one another.
Case Study #3: Trio Manufacturing
Trio Manufacturing engaged with Cobots in 2013 as they were seeking a solution to their extreme labor shortage and resulting capacity constraints and stressed culture. Trio leads the market in decorative badging and their design knowhow and molding capabilities are revolutionizing the market, leading to expansive growth. Yet twice a day, the bus from 50 miles away arrives with temporary workers. An unreliable local workforce and labor shortages was leaving 10% of the molding machines un-manned and not running. This required unscheduled weekend overtime which the majority of long standing employees did not want.
Trio’s commitment to a collaborative robotics strategy was significant. Two direct hires of robotic technicians work with a lead manufacturing engineer to design, build and deploy Cobot automation systems doing a variety of material handling (packaging) and fabrication applications (gate removal). Given the known business issues by working mandatory overtime, the production operators adopted the Cobots as teammates, in some cases naming them: “We like the Peanuts gang, this one is Lucy.” It is not surprising therefore that the human worker-Cobot team is working together in production cells with part-to-part interaction. The key is the ownership the production team takes in the output. Most every production supervisor can power up and start the programs. Many are able to evaluate the fault codes and correct for minimal down time. Jason, a Molding Supervisor with 12 years on the floor notes “I can do some basic things like change the program and recover most errors, but we have 3 technicians on every shift if more help is needed.” Dorothy, a Team Leader with over 5 years’ experience, added “I hit a button and it [Lucy] gives me a part for quality inspection” thereby illustrating how easy it is to interrupt the process, finish the work and keep production running. In response to the question “What is the role of the production workers related to the use of Cobots?” Sean, the Sr. Process Engineer for 19 years noted “most applications come to the floor with new business,” however Jason commented, “If we see something working in one area of production, we want to use it in our department.” So continuous improvements are constantly evaluated and shared for best practices. With more than 20 Cobots running machines and processes every day they have become integral to the results.
In response to the questions “Do you feel safe? And do you think Cobots will take your job?” With respect to safety, all installations are following the guidelines from their Safety Risk Assessment however Dorothy’s comments reinforce a strong company culture: “I feel safe, I know my company and co-workers will make sure I don’t get hurt.” As for Cobots being threats to employment, Sean emphasized “arguably we are in one of the tightest labor markets in Michigan. We have to bus people to this area for help – no one is losing their jobs.” Nevertheless with a large tier-one plant less than a mile away regularly offering workers more money in effort to poach local labor, Sean knows he is going to battle the labor issues for some time to come. Jason stated “I’ve been working here since the first Cobot was launched, no one has lost a job to a Cobot, we reassign them to other work in the plant.”
In response to the question “How do Cobots impact your job?” Dorothy explained simply “They make it easier; they are reliable and predictable…however there’s one Cobot that that works pretty fast and I have to keep an eye on that cell.” Molding cycle times and cavitation are variable, keeping the finished goods and empty packaging moving into and out of the cell is the role now for the operators and Team leader in that area. Jason noted, “I can plan the operator schedules and part production plans without concerns. We’ve stabilized our processes with 15 of the presses now fully automated.” And Tyson, a Production Operator for over 13 years noted “I got this new promotion specifically because of the Cobots and my interest.” Collectively, they stated “we make more money!” as Sean explained how the company recognizes the effort and skills being developed and wants to build on the momentum by reinvesting in the people and processes that are making a difference. Asked what would happen if they went back to the old days Sean said, ”No one would like to see them [Cobots] go. It’s clear they are helping the business doing the dull and dangerous jobs that most people struggle with.”
What makes the Trio experience so powerful isn’t just the improved culture and open capacity but the creativeness associated with controlling the technology which has lead to unexpected benefits. Decorative badging has to be flawless since the badge both conveys the corporate image often enhancing the social status and image of the vehicle owner. In the auto industry, historically, badges were a symbol of social capital and cultural. The process of badge making today requires a molded plastic part to be chrome plated before final assembly. Unfortunately, flaws in the molding process are only identified after plating, creating a large scrap problem both in terms of cost and environmental impact because no rework is possible.
The engineer and technicians at Trio devised a solution using inductive heating elements to heat the cavities in the mold while parts are being removed. Connected to the Universal Robot (and behind a guard due to safety), the Cobot positions the elements for a specific time then retracts from the mold before it closes to make the next flawless part. Hot molds result in better mold flow and elimination of knit lines which create the failure. Sean confirmed “we fixed a major scrap issue, there was about 10% fall-out…with the Cobot solution we are less than 2%. Scrap cost about $1 for molded plastic and $5 for the chrome plating – so this is a big impact.” Higher quality, major scrap cost reduction, higher output and level production throughout the week has all been achieved by a self-directed team.
Finally, when asked “How do Cobots impact your company?” Sean stated, “[I]n automotive our customers expect annual cost reductions to remain competitive. With the Cobots we can do that AND reinvest in our people”. Adding “steady growth and reinvestment has allowed us to open up more technical roles that people want to work in”. Sean’s point is consistent with our findings at other customers, elevating the perception of work on the floor changes the paradigm to an Advanced Manufacturing facility. Because the technology is accessible through logical programming/teaching interface – those without programming language experience can engage in the automation and bring more value than the physical aspects of work. Larry, one of the Robotic Technicians with 8 years on floor emphasized “we won a new customer because of Cobots were the technology they wanted to see us use. They were looking to incorporate themselves and now have a partner to learn from”.
In this case study the team consists of senior management investing in people and tools, engineering taking a lead by fixing the problems that impact the business the most, and the production team owning daily production and recommending future use. Ultimately this equation results an approach to automation that integrates robots into the team production process. It is best summed up by Larry the technician: “I never programmed robots or built automation before this job, now I’m able to do that in a matter of weeks and it matters to our management. I can only imagine what we’ll do next.”
Agency and Automation in Case Study #3: Automation and the Expansion of Agency Beyond Humans
There is no single outcome, no one size fits all result emanating from the adoption of automated machines, robots, co bots and artificial intelligence. New technology is surely displacing human agency in the performance of man routine, standardized, rule-based tasks. But robot technology also can have the effect of enhancing human agency and even extending our ideas and imaginations about what constitutes agency.
In analyzing the human element from different social science perspectives we can recognize that economics understands human action in the purposive, rational individual agent. In sociology human activity takes place through the creation of systems shared meaning with other human agents, for example Alfred Schutz’s idea of the lifeworld. The critical theorist and sociologist Jurgen Habermas distinguishes between these two realms of human agency through his use of the phrases system and lifeworld. The system is the world of goal-oriented actions in which individuals utilize nature and technology – and sometimes other people – as a means to an end. So technology is literally and figuratively a tool to be used to accomplish a task. Robots can be conceived as tools to be used (programmed) to accomplish discrete tasks (moving a bin of parts across the warehouse floor to an exact spot). With the introduction of collaborative robots and artificial intelligence we can begin to discern an element of meaning making in the programming and deployment of technology.
Jürgen Habermas not only identifies two separate spheres of human activity – system and lifeworld – but he also makes the bold argument that the two spheres are guided by different types of rationality (Habermas 1987). Heretofore rational action was understood to encompass means-ends behavior. I do this in order to accomplish that. Why did a company adopt new technology? Because new technology best fulfills the goal of the company: profit maximization. The goals themselves might change depending on which agent of the company we are concerned with. For instance the newly hired CEO might have the goal of increasing the share price and dividend payout which goal may or may not align with profit maximization.
Elements of these two types of industrial production remain today. They mirror in some ways a dual logic of human agency comprised of (1) instrumental action and (2) communicative action. Instrumental action is exemplified by the Fordist case in which machines are used strictly as a means to an end. Spot welding can be better (more safely and inexpensively) accomplished by welding guns attached to automated mechanical arms than human welders. Communicative action, by contrast, requires human interaction. The goal is that we understand one another, not that we agree, but that we are able to interpret what the other person means to say or do. Flexible specialization, best illustrated by team production, makes use of communicative action for its success. The requirements for understanding one another are: comprehensibility, legitimacy, sincerity and truthfulness.
Comprehensibility: Is the agent using actions, words, language, phrases, jargon, symbols that make sense to me? This is the foundation of communication. In the absence of translation devices there cannot be effective communication.
Legitimacy: Does the agent have the proper credential, standing, personal history or lived experience to say what they are saying? For example, someone prescribing medication or advising on a surgical procedure without a medical license lacks the legitimacy to elicit actions that conform to such medical statements.
Sincerity: Does the agent mean what they are saying/doing? We can question the sincerity of someone by asking “Are you joking?” “Do you really feel that way?” At the end of the day we respond to them – or not – based on our own assessment of their sincerity.
Truthfulness: Does the agent have the information or facts necessary to make/take the statements/actions they are making/taking? Fact-checking has become a full-time occupation for many in the media where untruthful public statements seem more commonplace. This lack of believability or trust in the veracity of another’s actions undermines the ability to understand one another.
In the case of robot-human interaction sincerity and truthfulness can be thought of as trust. In other words robot actions are sincere in the sense that they map onto expected behaviors and truthful robots are machines that act and move in ways that align with the given information available to it. In turn, trust is associated with confidence in the quality of the information produced by the robot. So we can collapse sincerity and truthfulness into trust. Figure 1 illustrates the components of ‘communicative’ action involved in human-robot meaning creation and interaction.
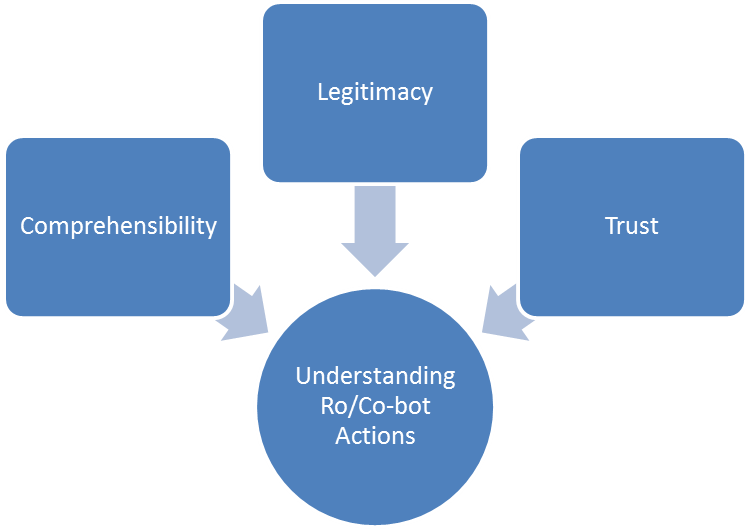
Figure 1: Requirements for meaningful human-robot interactions
Schaefer, Chen, Szalma and Hancock (2016) identify 3 main categories of the trust relationship: (1) Human Factors (demographics, personality, cognitive and emotional factors); (2) Partner-Related and (3) Environment-Related. The partner refers to the robot/cobot. The partner-specific factors affecting trust include:
- Mode of Communication – human speech is more trusted
- Appearance/Anthropomorphism – human appearance increases trust
- Level of Automation – “individuals exhibit greater trust in automation that provides some level of collaboration. For example, users typically trust manually adjustable automation when it provides explicit control (i.e., the human has the authority over system function allocation), compared to implicit control (i.e., the system is given the authority); individuals prefer automation that can learn, recognize, and respond to personality differences” (Schaefer, Chen, Szalma and Hancock 2016, 383)
- Intelligence – capacity for learning and adaptation based on feedback
- Personality – ability of robot to adjust to user personality
In the 21st century the question is now whether robots, AI and automated devices like driverless vehicles have entered the world of communicative action as agents in their own right.
Humans…therefore become partners, not just “users,” and the relationship between human and robot is not unidirectional (or absent) anymore, but depends on both the interacting agents. We posit that for this dynamic equilibrium to work and for it to bring the expected benefits, robots will have to become more humane, so as to establish an effective mutual understanding with their partners and carry part of the effort needed to maintain the interaction (Sciutti, Mara, Tagliasco, Sandini, 2018, 24).
Cobots in the workplace allow us to expand our notion of agency in such a way that “agency is decoupled from criteria of intentionality, subjectivity, and freewill” (Sayes 2014, 141). The actions of human workers change based on their relationship to their robot co-worker. “The perspective asks that we remain open to the possibility that nonhumans add something that is of sociological relevance to a chain of events: that something happens, that this something is added by a nonhuman, and that this addition falls under the general rubric of action and agency” (Sayes 2014, 145). So the third case study of Trio moves us along a road in which agency is expanded to include non-human actors.
CONCLUSION
The three case studies presented in this paper and presentation reveal that there is no singular effect of automation on agency. In the case of Uno Motors (Case #1) the use of Cobots to visually inspect for leaks and clip placement using augmented reality (AR) technology replaced human eyes for this particular task. Not only are Cobots not prone to human fatigue resulting from the monotony of scanning for defects but the quality of inspection improved through the use of AR. The result was a reduction of costly customer warranty claims to near zero, saving the company up to $7,000 per unit sold. The authors describe this as a case of task – as opposed to worker – displacement. The displacement of tasks formerly completed by workers allowed the company to shift workers to other tasks such as Cobot supervision and programming. Here Cobots are used in an instrumental way to meet needs of a high-volume mass producer much like most expensive, dedicated, single-purpose capital goods have traditionally been used in manufacturing.
At Duo Global Technologies (Case #2) the move away from using outside integrators to program and deploy robots to meet the production requirements of the customer meant that Cobots were used flexibly to solve a variety of manufacturing needs as they arose and as the plant staff gained skills in programming and controlling the Cobots themselves. The flexible use of Cobots at Duo reflects the flexible specialization system of manufacturing that became an important part of the customized specialty manufacturing link in the automotive supply chain. The result for worker agency at Duo was to enhance their role in the production process by increasing the need for robotics engineers and robotics technicians, partly obtained through up-skilling the current workforce.
Finally, the case of Trio (Case #3) illustrates the collaborative dimension of Cobot-human interaction. Specifically the Cobots at Trio are trusted, responsible co-workers. They are team members that are given names (Lucy, in the example above). The use of Cobots in this case begins to complicate the definition of agency. Cobots need to communicate their “intentions” – regarding, for instance, range of motion, direction, speed and force of motion – in order to make them understandable to their human co-workers. Their actions must be comprehensible. Workers need to be able to trust the intentions of the Cobot. And finally Cobots need to be recognized as legitimate co-workers with actions that align with the goals of safety, predictability and efficiency. These fundamentals of comprehensibility, trust and legitimacy map closely onto Habermas’ theory of communicative action as action oriented to understanding one another.
In these three case studies the trajectory of human-robot interaction is illustrated through human agency task displacement; human agency enhancement and human with robot agency in collaborative production. This tracks the historical development of human-machine interaction in manufacturing through high-volume mass production through flexible specialization. It also illustrates forms of rational action from instrumental action to communicative action in which mutual understanding is the desired goal.
NOTES
1. Geiger, A. “How Americans See Automation and the Workplace in 7 Charts,” FactTank April 8, 2019 https://www.pewresearch.org/fact-tank/2019/04/08/how-americans-see-automation-and-the-workplace-in-7-charts/
2. Source: https://www.onetonline.org/link/summary/17-2199.08
3. Source: https://www.onetonline.org/link/summary/17-3024.01
REFERENCES
Acemoglu, D. and Restrepo, P. (2017). “Robots and Jobs: Evidence from US Labor Markets” (No. w23285). National Bureau of Economic Research.
Bharadwaj, A. and Dvorkin, M.A. (2019). “The Rise of Automation: How Robots May Impact the U.S. Labor Market.” Federal Reserve Bank of St. Louis The Regional Economist 27, 2.
Elejalde-Ruiz, Alexia. (2018). “Manufacturers adopt robots that help human workers, not replace them. For now.” Chicago Tribune, October 18.
Frey, C.B. and Osborne, M.A. (2017). ”The Future of Employment: How Susceptible are Jobs to Computerisation?” Technological Forecasting and Social Change 114: 254-280.
Habermas, Jurgen. (1987). The Theory of Communicative Action, Volume 2: Lifeworld and System. Boston: Beacon Press.
Hobsbawm, E. (1964). Labouring Men. London: Weidenfeld and Nicolson.
Horn, J. (2012). “‘A Beautiful Madness’: Privilege, the Machine Question and Industrial Development in Normandy in 1789.” Past & Present 217(1): 149-185.
Manuel, F.E. (1938). “The Luddite Movement in France.” The Journal of Modern History 10(2): 180-211.
Meyer, S. (2002). “’An Economic’Frankenstein’: UAW Workers’ Responses to Automation at the Ford Brook Park Plant in the 1950s.” The Michigan Historical Review 28(1): 63-89.
Munby, L M. 1971. The Luddites, and Other Essays. Michael Katanka Books.
Pittman, K. (2016). “A History of Collaborative Robots: From Intelligent Lift Assists to Cobots” Engineering.com. Accessed [08 10, 2019] https://www.engineering.com/AdvancedManufacturing/ArticleID/13540/A-History-of-Collaborative-Robots-From-Intelligent-Lift-Assists-to-Cobots.aspx
Sayes, E. (2014). “Actor–Network Theory and methodology: Just what does it mean to say that nonhumans have agency?” Social Studies of Science 44(1): 134-149.
Schaefer, K. E., Chen, J. Y., Szalma, J. L., & Hancock, P. A. (2016). “A meta-analysis of factors influencing the development of trust in automation: Implications for understanding autonomy in future systems.” Human Factors 58(3): 377-400.
Sciutti, A., Mara, M., Tagliasco, V., & Sandini, G. (2018). “Humanizing human-robot interaction: On the importance of mutual understanding.” IEEE Technology and Society Magazine 37(1), 22-29.
Thompson, E.P. (1966). The Making of the English Working Class. New York: Vintage.
Thompson, E.P. (1971). “The Moral Economy of the English Crowd in the Eighteenth Century.” Past & Present (50): 76-136.